In his youth, Jack Hayden was involved with his school’s Science Olympiad, where he learned about interactions between different types of science and “how much fun” science can be. Now a student in the exercise science M.S. program at Cleveland State University, he has become the main tester for the Human Fusions Institute’s bi-manual robot arm setup and virtual reality training process.
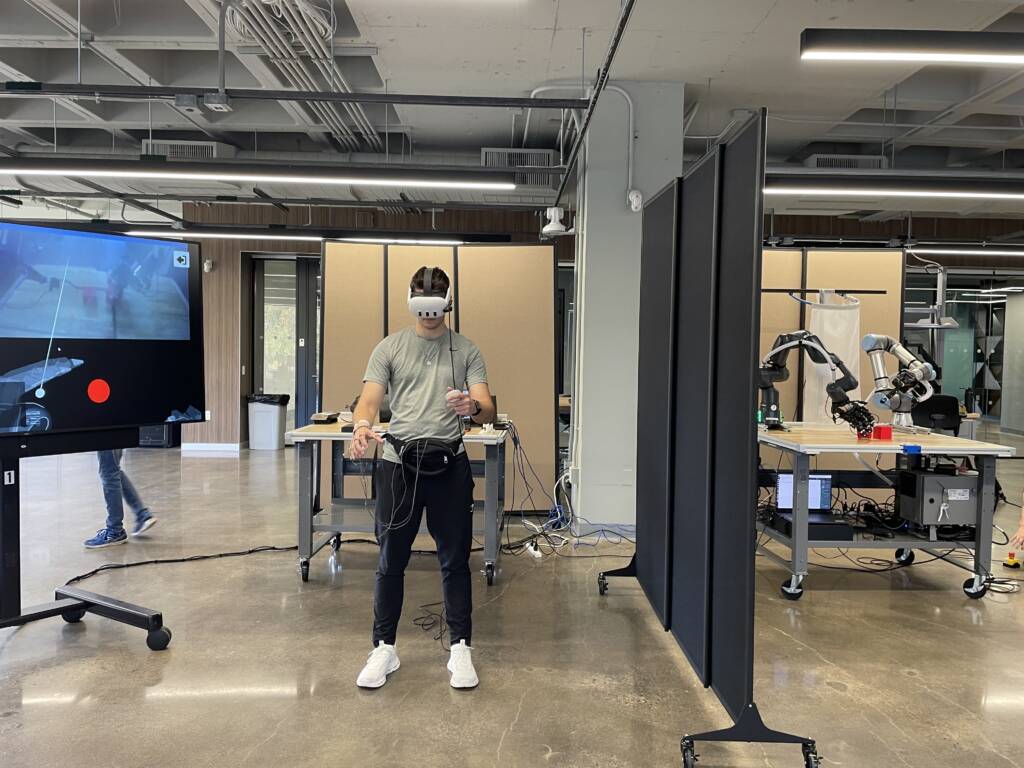
The robot arm setup, a culmination of HFI’s research components, is a significant part of the institute’s Office of Naval Research project. The researchers envision a future where the system can be operated remotely, allowing the operator to experience the robot arms as their own and even feel the grasp through the stimulators.
Hayden first learned about the opportunity while taking a class with Doug Wajda, one of three Cleveland State faculty members affiliated with HFI. “When the human factors team decided that we were going to produce a training module, he was the first person to come to mind as our user to take through the whole process,” said Wajda. Human Factors is an interdisciplinary team focusing on human performance and experience between humans and machines.
At the beginning of the process, Hayden familiarized himself with virtual reality and electrical sensation interfacing. Once acquainted with the controls, he started the stimulation acclimation task, which involved sorting a table of avocados into groups based on their harness. His next task was the virtual twin activity, where he moved objects between two virtual robot arms with different levels of vision, from transparent to opaque. His next task was the reach module, which helped him become more comfortable with the robotic arm movement and range. Finally, he practiced gripping objects with the robotic arms, squeezing them with a set intensity, and reaching around obstacles to grab each object.

Using what he learned from his training to teleoperate the physical robot arms, Hayden used his arms to grab objects of different sizes and compliance and was able to discriminate between each through stimulation. Touch helped him when various levels of visual degradation were introduced in the system, enabling him to complete the search and identify tasks.
Hayden is proud of how much progress he has seen as an individual and in the system. “The system has been improved, and the training program has become much more fluid and effective,” he said. “At the beginning, I was nervous and slow with my movements, but now I am very confident and trust that I know how the robot will operate and move as I complete tasks.”
After each demonstration or test, the team collects feedback and makes the necessary adjustments. Hayden looks forward to gaining information to improve the system as he continues his work. He emphasized how much he has enjoyed working on a project to help develop technology that potentially limits injury risk. “I have also enjoyed getting to know so many amazing people working in collaboration on the project,” he said.
“Jack was instrumental to the success of our training modules,” said Wajda. “Not only did he show up every day ready to become more proficient in using the system, but he also offered valuable discussion and insight regarding the refinement of the training programs.”
After Hayden graduates from Cleveland State in December, he hopes to become a strength and conditioning coach for a professional sports team. He hopes to help strengthen professional athletes and work with biomechanists to reduce the risk of injury.